
得更快。前所未有的速度。
大约有180台设备的潜艇光电子与所需的硬件。
由于每个信号不可能自己的物理连接,所有的设备使用一个串行协议。每个设备都有一个地址和一组寄存器,可以命令或报告他们的状态控制程序。
试点范围的内部保持在大气压力(约14 psi),所以没有减压飞行员要求。然而以外的领域的全面冲击了上面所有的水的质量。在马里亚纳海沟,16000 psi。
串行数据、力量和摄像机提要去的子通过很(非常)叫做渗透者的特殊连接器端口,电子和光纤电缆,玻璃。
看到深海挑战者号在维基百科的页面几乎每个系统建成以来冗余,潜艇的每一部分大致分为5部分。
端口(左)、右(右),中间,和底部。这样,如果任何一个系统失败了,它并没有把整个系统连接。这意味着我们有很多串行端口,12物理和2或3 UDP / TCP网络的记忆。
系统优化需要采取任何命令,是一个从飞行员的触摸屏或一个来自任何飞行员控制,并将它转换成适当的设备的串行地址和命令寄存器。
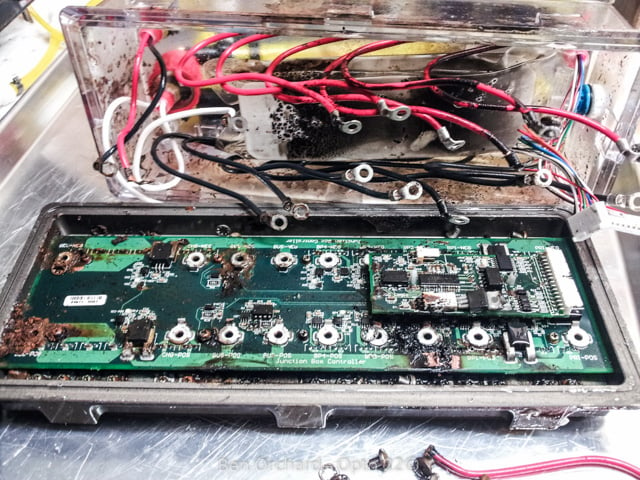
除此之外,软件必须考虑任何设备故障....例如,这里有一个电源开关箱后进入深潜水和一些水。
带领程序员写了一些代码,时间多久任何给定的串口走上与它所有的设备通信时一切都是启动和运行,以价值为“健康”的价值。如果任何设备需要更长的时间比过去,跳过。这样,不管什么设备失败,或者在什么模式下他们失败时,系统响应从来没有变化。这种一致性是重要的飞行员,他将获得用于潜艇的反应。它在水里的感觉对他来说变得非常重要。
例如推进器。

这里有三纵三横推进器。(只有两个垂直的这张照片是可见的)。
像其他设备,推进器在不止一个串行总线。每个推进器可以吩咐对于一个给定的RPM(推力)和地位可以请求数据,比如它认为当前RPM是什么,它的直流电流消耗,水进入传感器状态,温度,等等。
起初推进器的反应,而延迟。像大多数吞吐量问题,通常没有一个(“魔法”)解决;这是一个组合的东西。
首先,操纵杆连接到一个模拟输入模块。他们开始使用8输入模块,280 ms的数据新鲜度。我们交换的4输入模块它有一个数据新鲜度的只有20毫秒。
通过关闭控制引擎PAC-R控制器和使用它作为一个高速I / O架从主PAC-S2控制器,我们捡了一些速度。
把PAC-R和S2在自己的网络而不是子的以太网网络捡起一些。(这只是一个许多很酷的东西,你可以用光电元件22控制器,因为每个人都有两个独立的以太网端口)。
确保软件从来没有超过通常的健康时间等待响应也帮了很大的忙。
一点一点地,我们得到了系统的速度,飞行员非常满意的响应时间。我们确保它保持一致的变化在整个潜水计划。
对速度的需要
不是每个系统需要运行“快”。Air-conditioning in an event hall simply does not need millisecond response times. Neither did Deepsea Challenger for that matter. Sure, it needed better than the ~800 ms we started with, but there was no need to get it much below 100 ms.
如此诱人的总是竭尽全力运行一切,值得现在后退一步,然后问“这真的需要多快呢?”
在第3部分中,我们将看一下图形界面使用的飞行员通过触摸屏来控制潜艇的功能。
直到那时,欢呼声伴侣。